A fish finder is a useful tool for tracking and finding schools of fish. Unfortunately, a fish finder cannot do all of the work for you. Contrary to what the name might suggest, the fish finder doesn’t actually find fish.
A fish finder only gives you information about the conditions of the water, such as the water depth, the nature of the subsoil, and the irregularities above. In the end, it is always up to the user to interpret this information correctly and thus catch the fish more easily.
But how does a fish finder work? How do sonar navigation and imaging help you catch more fish? Today we would like to get to the bottom of this question in this article and explain the technology to you in more detail.

With the use of sound navigation and ranging technology (SONAR), anglers know exactly how deep the water is, what the bottom of the water looks like, and where the fish are.
The fish finders on the market combine GPS technology. This means they come with the fish finder head unit, the GPS receiver, as well as a transducer. In this section, we’ll see how the fish finding transducer work, the importance of the GPS, the network connection, among other basic features.
The fish finder technology was first used in World War II to track down enemy submarines. It sends out sound waves that move through the water at a speed of more than 1,500 meters per second.
The device works with a membrane that emits short, downwardly directed sound impulses. The sounder measures the time it takes for sound to travel to the bottom and back again.
The speed of sound in water is around 1,500 meters per second. The transducer calculates the water depth from the running time and speed. The technology also warns of shallows in which the ship could run aground.
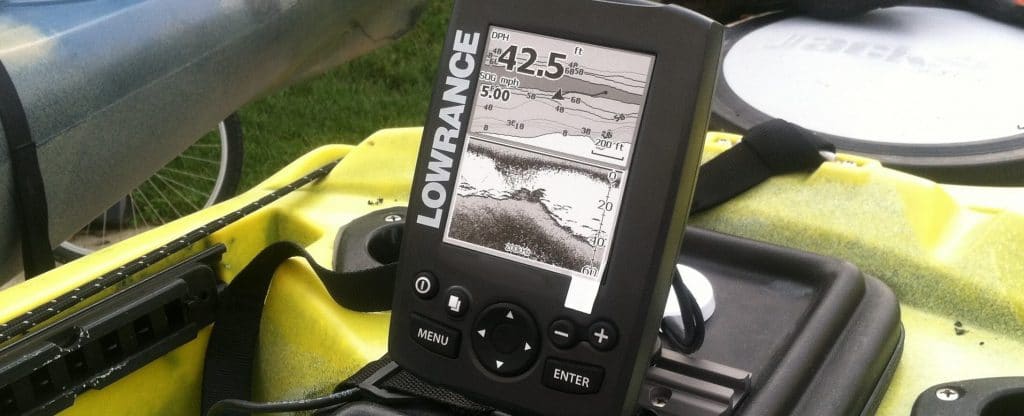
Today’s fish finders prepare the information nicely and clearly on the integrated display. While this graphic does not show exactly where the fish are to the millimeter, it can only give approximate values based on the irregularities detected.
A larger collection of several objects above the ground can be a clear indication of a school of fish.
If these ultrasonic waves hit an obstacle, they are reflected and received again by a transmitter on the fish finder. This transmitter then measures the time until the sound waves come back. In this way, the distance and the nature of the ground underwater can be determined very precisely.
A fish finder with GPS is useful for fishing as it helps with navigating and scouting fishing areas. With GPS navigation while fishing, you’ll find the best hotspots. And you can also mark them for future fishing trips.
Also, it is often possible to record the depth while moving and thus get a fantastic overview of sloping edges and underwater hills!
If you want to buy a fish finder, don’t save on the wrong side by choosing a model without GPS. Sooner or later, you will regret the ten percent savings for a fish finder without GPS.
The service life of simple fish finders without GPS is usually only a few weeks or months until their owners see the need to upgrade and buy a combination device with GPS and chart plotter.

Screen definition (number of pixels) is an important factor when choosing a sonar. A pixel is the minimum display unit on a screen – think of it as a simple small dot. All these little dots are what you end up seeing on the screen.
Suppose you have a modern screen of 640 * 640 pixels – it means that there will be 640 dots per row and 640 on each column or 409600 dots.
The most important criterion is the number of vertical pixels because they influence the precision of the detections. Each vertical pixel will represent a fraction of distance, while the horizontal pixels will keep the history of previous cycles on the screen.
The important thing to remember is that the more vertical pixels you have, the more details you will see. With more horizontal pixels, more history will be displayed on the screen.
On a 640 * 320 screen, 640 dots vertically, 320 horizontally. If you are navigating 20 meters deep, this means that these 20 meters will be distributed over 640 points, or 2000 cm / 640 = 3.125 cm/pixel. At 20 meters deep, each pixel will represent 3.125 cm. The resolution is pretty good, and you won’t lose a lot of information.
On a low-end sounder, which offers a resolution of 160 * 132, you have 160 points vertically and 132 horizontally. If you are still sailing 20 meters deep, this means that these 20 meters will be distributed over 160 points, or 2000 cm / 160 = 12.5 cm/pixel. At 20 meters deep, each pixel will represent 12.5 cm. If the resolution is very low, you cannot see small and medium-sized fish.
The choice of a color or gray level screen is also to be taken into consideration. Color does not just add a pretty touch. It makes it easier to identify weak and intense echoes and to adjust the color palette that seems most readable to you.
Grayscale screens also make it possible to identify the strength of the echoes thanks to a gray gradient, but it will be more limited than with color.
Fish finders are now able to communicate with each other and with the environment of the boat. The NMEA2000 cable and Ethernet are two of the most common types of network connections.

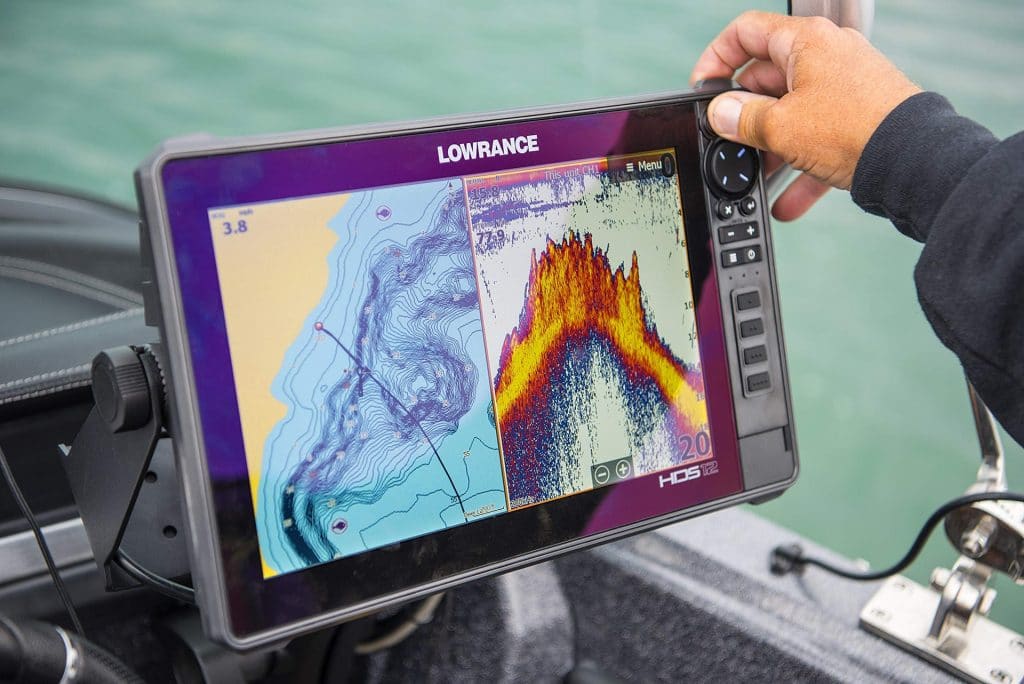
The imaging functions of a fish finder are great because you can see the underwater world in an almost photo-realistic manner. Fish finders read sound waves in different ways. These include the sonar imaging technology from under the boat (down scan, down imaging, etc.) and on the sides (side-scan, etc.).
The laterally aligned sonar is awesome because you can determine the exact position of fishing spots and thus approach them precisely. This is not the case with the downward variant. We have briefly summarized these types and their procedures for you in this section.
In the case of fish finders with a fixed frequency, the transmitter sends out individual sound waves of a frequency one after the other. The fish finder creates an image on display from the returning sound waves.
CHIRP stands for Compressed High-Intensity Radar Pulse. It works with multiple frequencies. With this method, the transmitter sends out several sound waves with different frequencies. Both high frequencies (very detailed images) and low frequencies (larger underwater area) are sent out.
DownScan fish finders are ideal for fishing in shallow waters. This offers a wealth of information. Fishfinders with DownScan Imaging transmit in the high-frequency range around 455 to 800 kHz. The underwater area directly under your boat is also explored.
The DownScan method is particularly suitable for fishing in shallow waters, as the lower frequency range is not required for this.
The name may vary depending on the manufacturer. Thus, the process is also known as ClearVü or DownImaging. The name DownScanImaging is used for Humminbird fish finders.
This provides most of the information. With this, fishing can be fun for the whole family. With SideScan imaging, the sound waves are also emitted to the left and right. In addition to the data from the down scan imaging, information about the position to the side of the boat is determined.
Fish finders in this category can locate individual fish or schools of fish more precisely than devices that use other methods. The best fish finder is equipped with side-scan imaging. There are also various names here.
The name SideScan Imaging is used with Humminbird fish finders. SideScan and SideVü are also common names. For many, a side-scan sounder is just too expensive to buy.
With Structure Scan HD, manufacturers are offering a process that creates photo-realistic images of the surroundings below and next to your boat. Structure Scan HD is only available on high-quality, expensive fish finders. Often, these are fish finders with a chart plotter.

In summary, how does a fish finder work? A fish finder is an electronic fishing accessory or boat accessory that gives you data about the conditions in the water. These are shown graphically and alphanumerically on display. With the fish finder, the fish can be located through the interpretation of information on water depth, bottom conditions, and irregularities in the water.
If the sound waves hit obstacles, it wanders back to the starting point. The reflected sound waves are received by the fish finder and converted into an electrical signal. The information is now shown on display.